5. SystemVerilog Threads
1. 进程概述
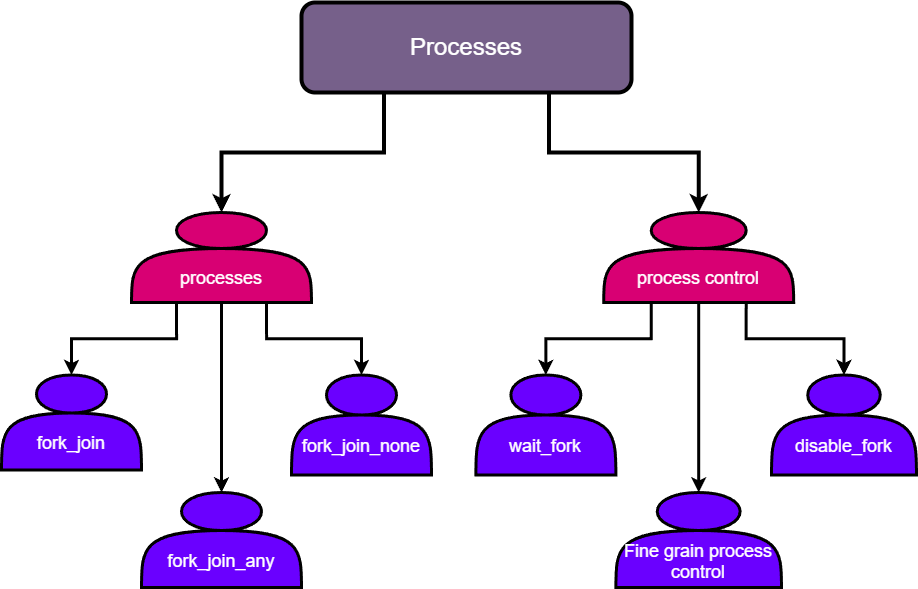
进程或线程是作为独立实体执行的任何代码片段。在SystemVerilog中,fork-join块用于创建并行运行的不同线程。以下是几种不同类型的进程及其描述:
| 进程 | 描述 |
|---|---|
| fork-join | 只有所有子线程执行完毕时,父线程才会执行 |
| fork-join_any | 只有任何一个子线程执行完毕时,父线程才会执行 |
| fork-join_none | 父线程与子线程并行执行 |
| wait fork | 使父线程等待所有子线程执行完毕 |
| disable fork | 当执行disable fork时,会终止所有子线程的执行 |
2. fork-join
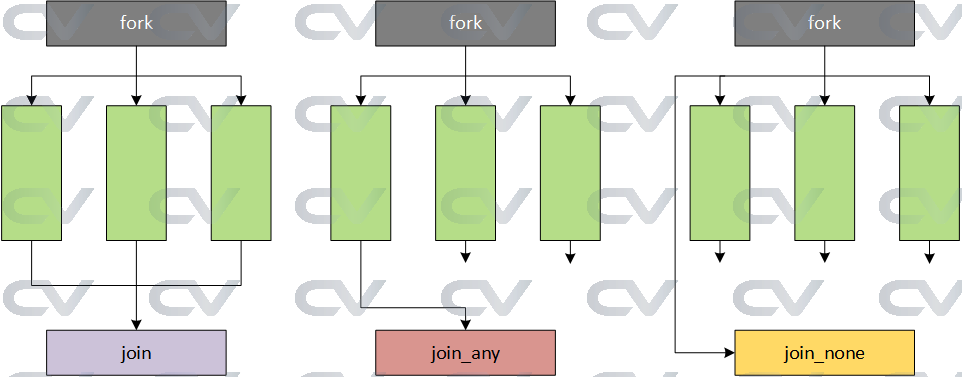
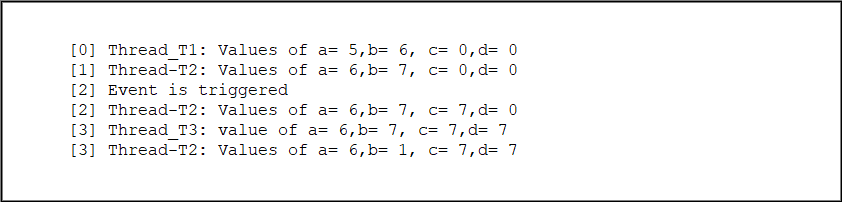
fork-join结构支持并行线程。在fork-join进程中,只有当所有子线程完成执行时,父线程才会继续执行。
语法:
fork
线程1
线程2
线程3
join
示例代码:
$display("[%0t] Thread_T1: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d", $time, a, b, c, d);
fork:FORK_F1
begin:BEGIN_B2
#1 a <= b;
b <= 7;
$monitor("[%0t] Thread-T2: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d", $time, a, b, c, d);
#1 ->e1;
c = b;
end:BEGIN_B2
begin:BEGIN_B3
wait(e1.triggered);
$display("[%0t] 事件已触发", $time);
begin:BEGIN_B4
#1 d = c;
end:BEGIN_B4
end:BEGIN_B3
join:FORK_F1
$display("[%0t] Thread_T3: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d", $time, a, b, c, d);
3. fork-join_any
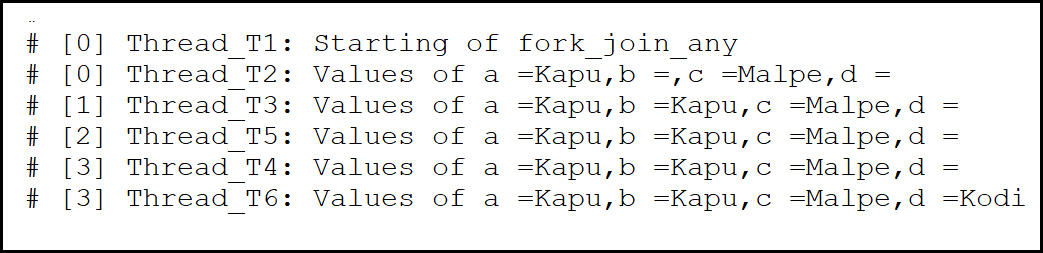
fork-join_any结构允许父线程在任何一个子线程完成执行后继续执行。这意味着即使有多个子线程,只要其中一个完成,父线程就会继续执行。
语法:
fork
线程1
线程2
线程3
join_any
示例代码:
$display("[%0t] Thread_T1: Starting of fork_join_any", $time);
a = "Kapu";
c = "Malpe";
fork:FORK_F1
begin:BEGIN_B2
#0 $display("[%0t] Thread_T2: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
begin:BEGIN_B3
b <= a;
#1 $display("[%0t] Thread_T3: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
end:BEGIN_B3
end:BEGIN_B2
fork:FORK_F2
begin:BEGIN_B4
#3 -> e1;
$display("[%0t] Thread_T4: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
end:BEGIN_B4
join:FORK_F2
join_any:FORK_F1
#1 $display("[%0t] Thread_T5: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
begin:BEGIN_B5
wait(e1.triggered);
d = "Kodi";
$monitor("[%0t] Thread_T6: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
end:BEGIN_B5
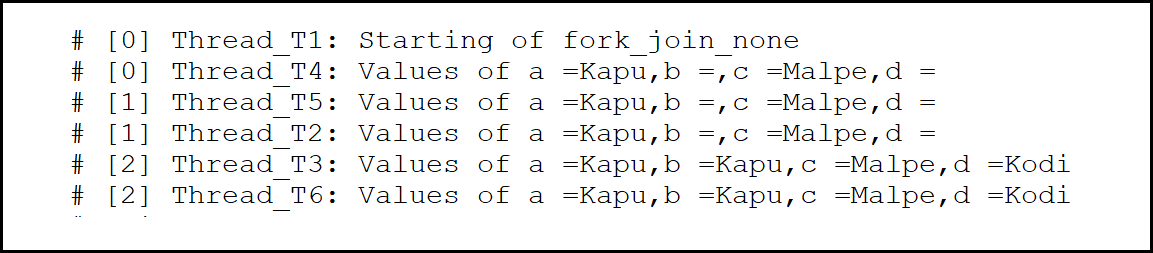
4. fork-join_none
fork-join_none结构允许父线程与子线程并行执行。父线程不会等待子线程完成,而是立即继续执行。
语法:
fork
线程1
线程2
线程3
join_none
示例代码:
$display("[%0t] Thread_T1: Starting of fork_join_none", $time);
a = "Kapu";
c = "Malpe";
fork:FORK_F1
begin:BEGIN_B2
#1 $display("[%0t] Thread_T2: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
b <= a;
#1 $display("[%0t] Thread_T3: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
end:BEGIN_B2
fork:FORK_F2
#1 -> e1;
$display("[%0t] Thread_T4: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
join:FORK_F2
join_none:FORK_F1
#1 $display("[%0t] Thread_T5: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
wait(e1.triggered);
d = "Kodi";
$monitor("[%0t] Thread_T6: Values of a =%0s,b =%0s,c =%0s,d =%0s", $time, a, b, c, d);
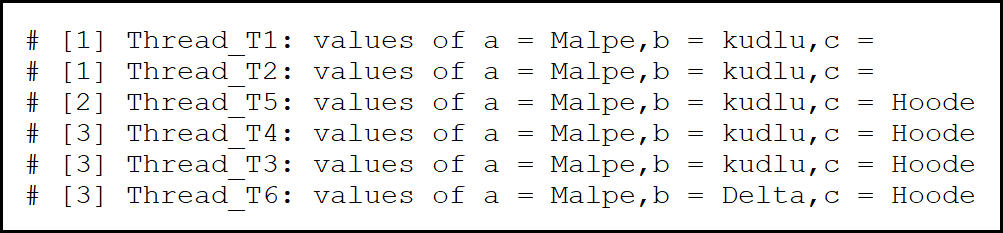
5. 进程控制
SystemVerilog提供了多种构造来控制进程的行为,包括终止和等待其他进程完成。
- wait fork:确保所有子进程都已完成执行。
- disable fork:终止所有活动的进程。
示例代码:
wait fork:
#1 $display("[%0t] Thread_T1: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
fork:FORK_F1
#2 b <= "Delta";
#0 $display("[%0t] Thread_T2: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
begin:BEGIN_B2
#1 -> e1;
c = "Hoode";
#1 $display("[%0t] Thread_T3: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
end:BEGIN_B2
fork:FORK_F2
wait(e1.triggered);
#2 $display("[%0t] Thread_T4: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
join:FORK_F2
#1 $display("[%0t] Thread_T5: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
join_none:FORK_F1
wait fork;
#0 $monitor("[%0t] Thread_T6: values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
disable fork:
#0 $display("[%0t] Thread_T1: Values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
fork:FORK_F1
#3 b <= "Delta";
#4 $display("[%0t] Thread_T2: Values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
begin:BEGIN_B2
#1 -> e1;
c = "Hoode";
#1 $display("[%0t] Thread_T3: Values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
end:BEGIN_B2
fork:FORK_F2
@(e1.triggered);
#1 $display("[%0t] Thread_T4: Values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
join:FORK_F2
#1 $display("[%0t] Thread_T5: Values of a = %0s,b = %0s,c = %0s", $time, a, b, c);
join_any:FORK_F1
disable fork;
#1 $display("[%0t] Thread_T6: ending of fork-join", $time);

使用fork-join、fork-join_any和fork-join_none结构,SystemVerilog 提供了强大的并发编程能力。这些结构允许用户灵活地控制多线程的执行顺序和同步。此外,wait fork 和 disable fork 语句进一步增强了对进程的控制,使得模拟和验证过程更加高效和可控。